Imagine a robot that can seamlessly roll on wheels, take flight with rotor-like wings, stand on two wheels to gain a better view, tumble, and even walk. This is not a scene from a science fiction movie, but the reality of M4 (Multi-Modal Mobility Morphobot), a revolutionary robot created by the brilliant minds at Caltech’s Center for Autonomous Systems and Technologies (CAST).
The M4 robot is a true marvel of engineering and innovation, boasting the ability to reconfigure its body into eight distinct forms of locomotion. Its incredible flexibility is made possible by the advanced artificial intelligence integrated into its system. This means that M4 can autonomously choose the most effective mode of movement based on the terrain it encounters.
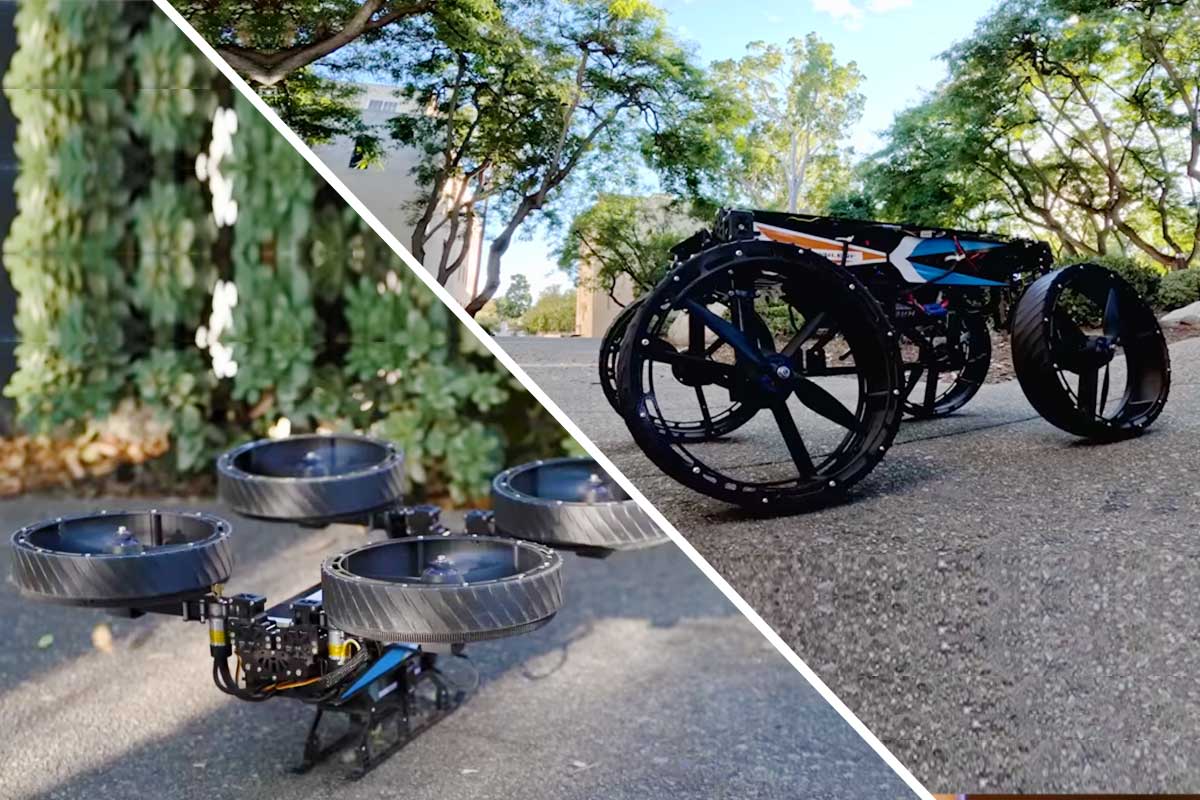
The primary mode of locomotion for M4 is rolling along on its four wheels, a highly energy-efficient method. However, as it encounters obstacles in its path, M4 can effortlessly shift to other forms of movement for optimal maneuverability. For instance, when faced with an obstacle, it can raise itself on two wheels to get a better view of the ground ahead.

This ability to stand on two wheels like a meerkat enables it to peer over obstacles and plan its next move accordingly. If M4 encounters a ravine or a gap, it can transform its wheels into rotor-like wings and take flight to glide effortlessly to the other side.

This ability to fly over obstacles is a testament to the robot’s versatility and adaptability, making it a truly multi-modal robot capable of navigating various terrains with ease. While the walking motion is more of a proof of concept, it showcases the incredible potential of M4 to replicate the locomotion of various creatures in nature.

M4’s design was heavily influenced by studying animals such as sea lions, which use their flippers for different types of movement on land and in water. This biomimetic approach has allowed engineers to create a robot that can imitate natural movements and achieve remarkable mobility.
Its ability to seamlessly transform and adapt to different environments has numerous potential applications, from search and rescue missions in challenging terrains to exploration in remote and hazardous locations.
Source: Caltech
Watch the M4 real-life Transformer robot in this video
